I build hardware that behaves.
— Working hardware tells the truth.
Electrical engineering at Hanze. Most days I'm tuning a robot, talking to a sensor over MQTT, or writing software for people who'd rather read in Tigrinya.
About
I started in software, ended up in hardware, and somewhere along the way fell hard for the kind of work where a missing pull-up resistor costs you an afternoon.
I study Electrical Engineering at Hanze, majoring in Sensors & Smart Systems — after a first year in Software Engineering before I switched. Through this degree most of my work has been in AI/ML and robotics: vision pipelines, sensor analytics, the kind of embedded code that has to behave under real loads.
Outside class my time goes to two things: making robots do what they're told — line-following, balancing, sorting parcels — and shipping software for the Tigrinya-speaking world. A news site. A health assistant. The first programming platform for Eritrean kids.
I'd rather show working hardware than draw boxes about it. If something doesn't run on a board you can hold, I tend to lose interest.
Right now
Interning at Ventura Systems on an IMU-based diagnostic for plug-sliding bus doors. The interesting part isn't catching a faulty door — it's telling which adjustment is off with a rule-based, interpretable classifier rather than a black box.
Updated May 2026 · from the Ventura lab, mostly
Where I've been
-
2026 — Present
Intern · Ventura Systems
Designing an interpretable IMU-based diagnostic for plug-sliding bus doors. Signal acquisition, phase-based feature extraction, rule-based fault classification.
-
2024 — Present
Indie builder · Self-shipped
Three live products for the Tigrinya-speaking world — CodeTigrinya (kids' coding platform), Tena (public-health assistant), Eritrea Today (news). Design, build, deploy, maintain.
-
2023 — Present
BSc Electrical Engineering · Hanze, Groningen
Sensors & Smart Systems track. Electronics, embedded, control theory, sensor analytics. Most of the AI/ML and robotics work I do day-to-day grew out of this programme.
-
2022 — 2023
BSc Software Engineering · Hanze, first year
Foundations in software design, algorithms, and web. Switched majors after a year to follow the hardware itch. No regrets — but no SWE year, no first ASA prototype either.
Selected work
-
01
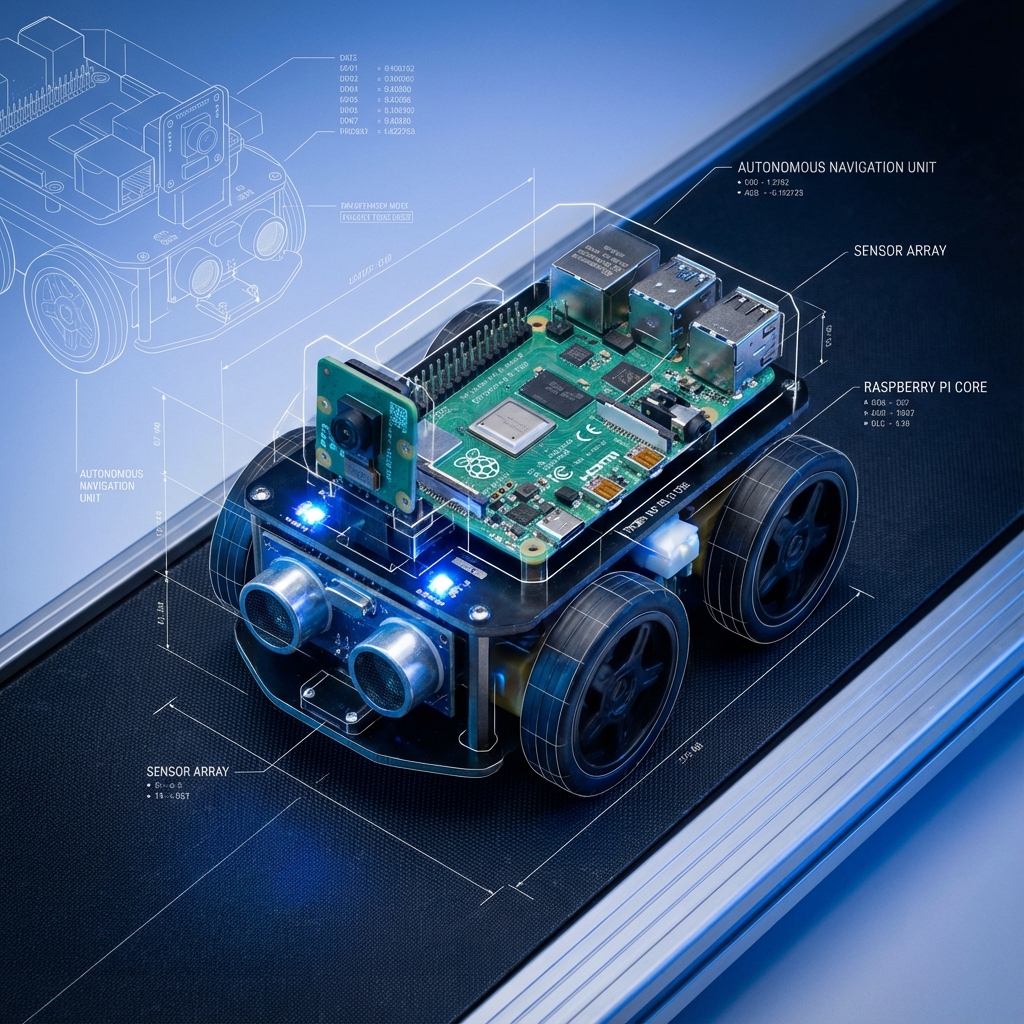
Vision-guided line follower
A camera-first robot that follows a track, detects obstacles with YOLOv8, and re-plans its path with Dijkstra. Built on a Raspberry Pi over one long semester — still the project I learned the most from.
-
02
Hardware-in-the-loop navigation
Webots on one side, an ESP32 on the other, talking over a serial bridge. Lets me test routing logic without smashing the physical robot into a wall — most of the time.
-
03
Smart parcel sorter
A computer-vision system that measures parcels in real time and drives a sorting decision on a small conveyor. Live dashboard for status, statistics, and the inevitable misreads.
-
04
ASA — algae sensor analytics
ESP32 + Raspberry Pi telemetry rig for an algae growth tank. pH, temperature, colorimetry, fluorescence — all streamed to Azure IoT Hub and surfaced on a dashboard you can actually read.

-
05
Self-balancing robot
Two wheels, one IMU, several burned-out drivers. A control-theory project that taught me patience and the value of a slow, well-tuned loop.
-
06
ኮድ ትግርኛ — CodeTigrinya
The first programming platform for kids that teaches in Tigrinya. Game-based, mobile-first, free. Built because no one else was going to.

-
07
ኤሪትሪያ ዜና — Eritrea Today
A news site that publishes in Tigrinya — modern stack, fast, responsive. A small thing that makes a language a little easier to read online.

-
08
ጥዕና — Tena
A bilingual Tigrinya-English public health assistant for Eritrea. Real-time chat, location services, plain-language answers to questions people can't always ask a doctor.
-
09
Simon — local voice assistant
A push-to-talk desktop assistant that runs a local LLM, speaks back with neural TTS, and never sends a thing to the cloud. The pet project that ate my weekends.

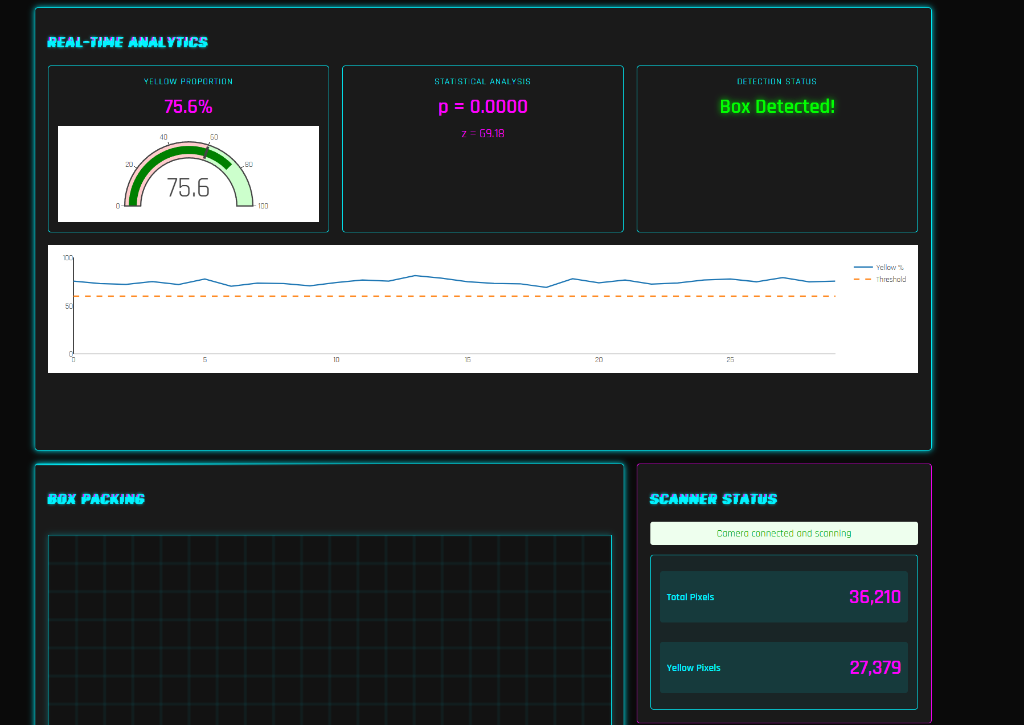
Smart parcel sorter
- Problem
- Existing conveyor sorters mis-classify boxes under uneven lighting, and the fix usually means more sensors.
- Approach
- Single calibrated camera, OpenCV pipeline for real-time dimension extraction, decision logic on top — with a live dashboard so the failure modes are visible, not hidden.
- Result
- Once the camera was properly calibrated, most of the misreads disappeared. The lesson was less clever code, more careful intrinsics.
- StackPython · OpenCV · NumPy
- Vision1 calibrated webcam, real-time
- DecisionDimension-ratio classifier
- UICustom live dashboard
- Repogithub.com/Simonf8/Rolling
ASA — algae sensor analytics
- Problem
- Algae tanks are sensitive to conditions a clipboard can't track. Spot checks miss the short windows where everything starts to go wrong.
- Approach
- Sensors in the water, an edge gateway in the lab, a cloud backbone on Azure. Calibrate once, stream forever, surface only what matters in a dashboard a biologist will open twice.
- Result
- Continuous pH, temperature, and colorimetry telemetry. Fluorescence sensing is going in next; the harder problem is what to show, not how to measure.
- SensorspH · temp · RGB colorimetry · fluorescence (next)
- EdgeESP32 · MicroPython
- GatewayRaspberry Pi 4
- TransportMQTT · JSON over TLS
- CloudAzure IoT Hub · time-series store
- UICustom dashboard, single source of truth
 live · streaming
prototype · v3
live · streaming
prototype · v3
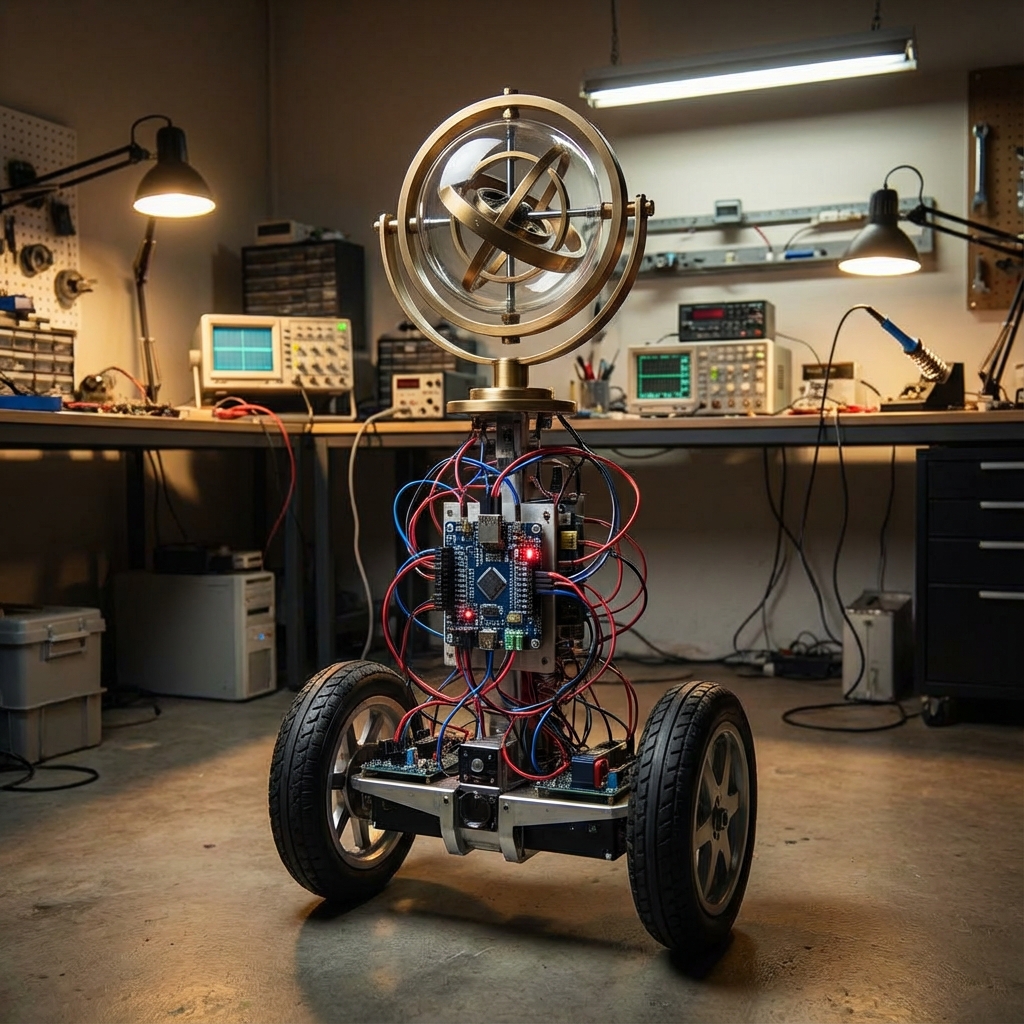
Self-balancing robot
- Problem
- An inverted pendulum on two wheels — the canonical control-theory project. Most homebuilds either oscillate forever or fall over once disturbed.
- Approach
- MPU-6050 for raw tilt, complementary filter to fuse accelerometer + gyro, PID loop tuned by hand at 200 Hz. The third hardware iteration finally has the chassis stiffness to make the control problem the real bottleneck.
- Result
- It stays upright under disturbance, but I keep coming back — mostly because real-world systems don't care how clean your block diagram looks.
- MCUESP32 · C++
- IMUMPU-6050 @ 200 Hz
- FilterComplementary — accel + gyro fusion
- ControlManually tuned PID
- DriveDual N20 geared motors
- Buildv3 prototype · custom chassis
Stack
- Languages
- Python, C++, JavaScript, a bit of Rust when no one is watching
- Embedded
- ESP32, Raspberry Pi, Arduino, UART / I²C / SPI
- Vision & AI
- OpenCV, YOLOv8, PyTorch, real-time inference
- IoT & cloud
- Azure IoT Hub, MQTT, REST, data pipelines
- Control
- PID, complementary filters, path planning
- Tools
- Linux, Git, Docker, far too much of the terminal
Get in touch
If you've got hardware that should be smarter, or software that should reach more people — let's talk.
I'm open to internships, embedded & robotics work, and collaborations on projects that touch Eritrea or the diaspora. Email is the fastest way to reach me — I read everything, I reply within a day or two.